00 - Introduction
Robotics I
Poznan University of Technology, Institute of Robotics and Machine Intelligence
![]()
Laboratory 0: Introduction
Teachers
Let us introduce ourselves:
Notes: We highly recommend prior email contact as most of the issues can be solved through email/online meeting or we can find a more suitable time for a meeting if needed.
- Tuesdays 13:30-15:00 → dr hab. inż. Michał Nowicki
- Wednesdays 11:45-13:15 → mgr inż. Kamil Młodzikowski
- Wednesdays 15:10-16:40 and Wednesdays 16:50-18:20 → mgr inż. Mateusz Piechocki
Class goals
Show that robotics can be interesting and is usually a signficant part of AI/Computing courses abroad
Teach students to not be scared when you see word
robotin the job description as it may not involve hardware at allIf it is not for you, we understand but just give it a try
If you find it interesting then let us know
Finally, we hope that you will know more after completing our course
AI in robotics and its applications
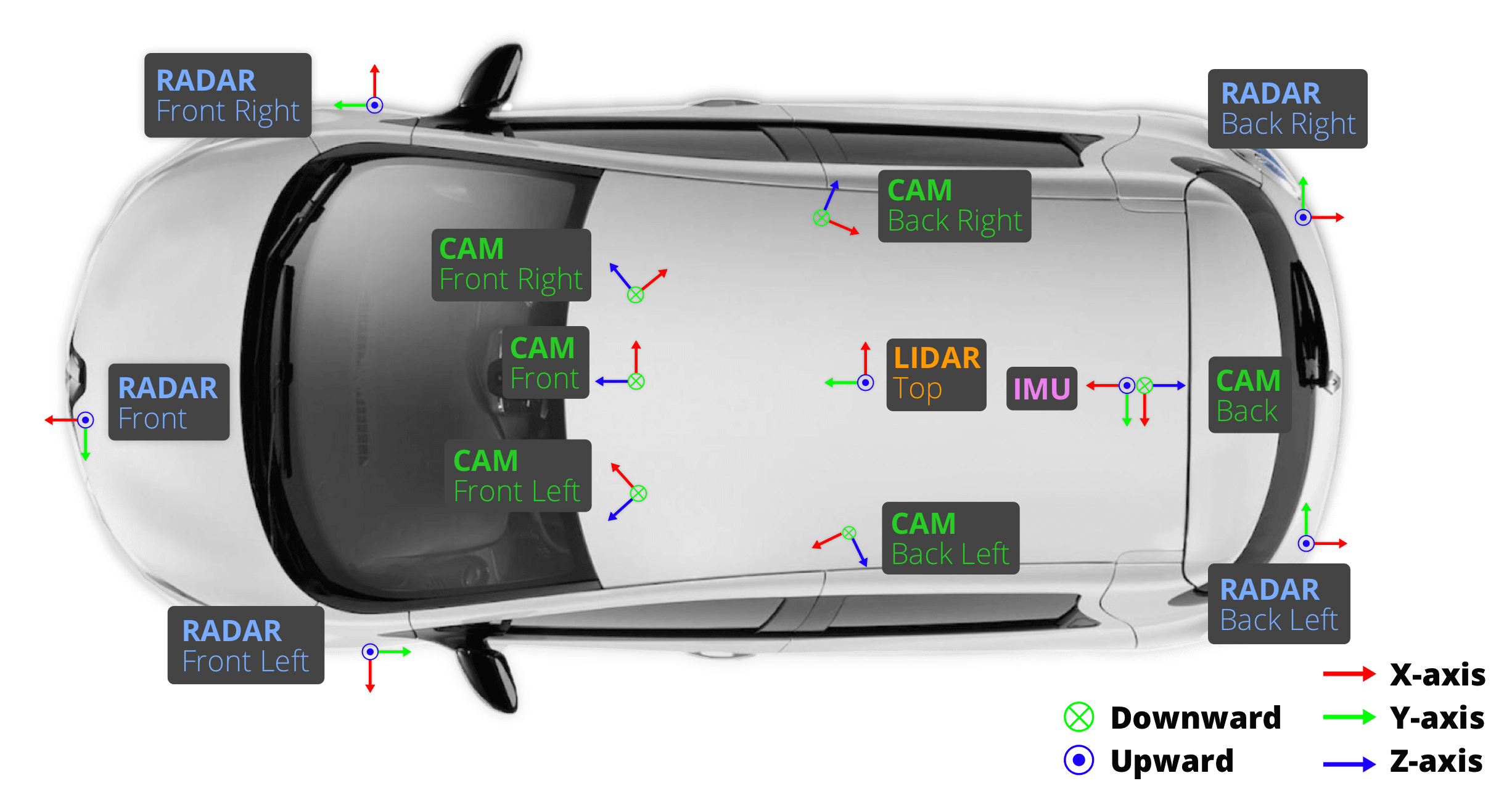
Sensory stack of an autonomous car is a great example as it start with proper sensory choices, mechanical and electric consideration, to AI algorithms processing the data, and finally the infrastructure to make it all happen. But robotics applications include many more areas like: * Agriculture * ADAS systems * Drones * Humanoids / Walking robots * Robots in warehouses * Space robots like Lunar rovers * Modern grasping techniques * … and many more.
Quick Q&A
- Q: What can be called a robot?
A: Robot has usually a physical presence (hardware) and thus can sense/interact with the environment.
- Q: What is cool about robotics?
A: Seeing with your own eyes when it moves/operates intelligently based on your own algorithms.
- Q: What is hard about robotics?
A: It only works well when mechanical, electrical, and software components are operating well at the same time. If something is wrong, then nothing will work.
- Q: Is robotics for me when I hate hardware?
A: Of course, none knows everything and people specialize. There are mechanical engineers, electrical engineers, embedded engineers, AI engineers, infrastructure engineers (dev ops), etc. with all of them working together towards a final working robot.
Class roadmap
These are the topics we plan to cover during our labs:
- Introduction and showing what robotics is really about
- Linux/docker
- ROS 2
- ROS 2 part 2
- ROS 2 part 3
- Multi-sensory calibration (intrinsics and extrinsics)
- Object detection - training
- Object detection - deployment in ROS 2
- Object tracking
- Coordinate systems and transformations
- System control
- Kalman filter
- Turtlebot3 in simulation
- Turtlebot3 in simulation part 2
- Quiz, time to catch up
Class execution
This is a plan estimate and may change during the execution. Each class will use a single instruction available at PUT-JUG:
- teacher provides the scope of task for today
- students do the instruction with teacher’s help
- There are not stupid questions. We are here to help. Ask anything
We will use eKursy to communicate and submit solutions. The key to join will be shared during the introduction class.
We are going to use Ubuntu and docker.
Class rules
We treat students as adults and we expect the same treatment from you
No eating or drinking in classes
We will have 15 classes. One can have up to 2 unexcused absences. If you are sick/have a valid reason then send an email to your teacher.
We will grade you based on
homeworksand the finalquiz.Homeworksare tasks from each instruction that should be completed with grading 0/1.Quizwill contain approximaty 30 A/B/C/D questions with each question having a single correct answer without any negative points for incorrect answers. The final grade will be based onquizand you only pass if you submitted allhomeworks.
Plan for today
- Presentation regarding the robotics projects conducted in our Institute
- Quick laboratory tour to see real robots
Questions
Are there any questions?